Optimiseur de trajectoire
Le Path Optimizer est l'intelligence centrale du projet — un service d'optimisation par lots qui résout le problème de tournées de véhicules avec ramassage et livraison (VRPPD). Implémenté en Python 3.11, il s'appuie sur Google OR-Tools.
Modèle d'exécution
Le service fonctionne comme un processus éphémère sans état (stateless), déclenché toutes les 10 secondes via Cloud Run Jobs en production (ou via un conteneur en local). Chaque exécution constitue un cycle complet :
- Récupération de l'état actuel (snapshot) auprès du Gestionnaire d'état via HTTP GET.
- Construction du modèle mathématique du problème de tournées.
- Résolution du modèle sous contraintes physiques et métier.
- Publication des affectations de missions résultantes sur Pub/Sub.
L'optimiseur lit tout ce dont il a besoin dans le snapshot et produit ses sorties exclusivement via Pub/Sub — pas d'accès direct à la base de données.
API Ingestion --> Pub/Sub --> State Manager --> Firestore
|
HTTP GET /snapshot
|
Path Optimizer
|
Pub/Sub (decisions)
|
State Manager --> Firestore (missions)
Classification du problème
Le problème résolu est un Vehicle Routing Problem with Pickup and Delivery (VRPPD) — variante NP-difficile classique du VRP. Dans notre contexte :
- Les Véhicules sont les drones (hétérogènes par leur batterie).
- Les Ramassages (Pickups) se font aux entrepôts.
- Les Livraisons (Deliveries) se font aux hôpitaux (destination finale).
- Chaque drone part et revient au même dépôt.
Contraintes additionnelles : - Fenêtres de temps sur les livraisons (échéances prioritaires : CRITIQUE 15 min, HAUTE 30 min, STANDARD 60 min). - Contraintes de batterie (proportionnelle à la distance, 2,5 % par km, réserve min 20 %). - Compatibilité Produit-Entrepôt (l'entrepôt doit stocker le type de produit demandé).
Construction du graphe VRP
Le graphe contient 2N + 1 nœuds pour N commandes :
Index 0 : Dépôt (départ/arrivée pour tous les véhicules)
Indices 1..N : Nœuds de ramassage (un par commande, à l'entrepôt compatible le plus proche)
Indices N+1..2N : Nœuds de livraison (un par commande, à la destination finale)
Décision de conception critique — Nœuds de ramassage uniques par commande : Chaque commande possède son propre nœud de ramassage dédié, même si plusieurs commandes sont collectées au même entrepôt physique. C'est impératif car AddPickupAndDelivery(p, d) dans OR-Tools exige une relation 1-à-1 entre ramassage et livraison. Partager un nœud entrepôt rendrait le problème infaisable.
Pour chaque commande, le constructeur choisit l'entrepôt compatible le plus proche (distance Haversine). Deux matrices (2N+1) × (2N+1) sont calculées :
- Matrice de distance (mètres) : distances Haversine entre tous les nœuds.
- Matrice de temps (secondes) : dérivée avec une vitesse constante de 50 km/h.
Dimensions et contraintes du solveur
Le solveur utilise l'API RoutingModel d'OR-Tools, exprimant le problème via des dimensions (variables cumulatives le long d'un parcours) :
| Dimension | Callback de transit | Limite supérieure | Rôle |
|---|---|---|---|
| Distance | Mètres entre nœuds | 100 km | Minimise la distance totale (évaluateur de coût d'arc). Un coefficient global encourage une répartition équitable. |
| Temps | Secondes entre nœuds | 3 heures (10 800s) | Impose les fenêtres de temps. Permet une attente aux nœuds jusqu'à 30 min. Le cumul au départ est libre. |
| Batterie | dist_km × 2.5 × 10 (scalé pour précision entière) |
1 000 unités (100%) | Limite par drone : (batterie_initiale% - 20%) × 10. Exemple : 85 % -> max 650 unités -> 26 km. |
Les contraintes ramassage-livraison assurent que la collecte et la livraison d'une commande sont faites par le même drone, dans le bon ordre. Les disjonctions (pénalité de 100 000 par nœud) permettent d'ignorer les commandes impossibles plutôt que de bloquer tout le cycle.
Choix de l'algorithme : Stratégie en deux phases
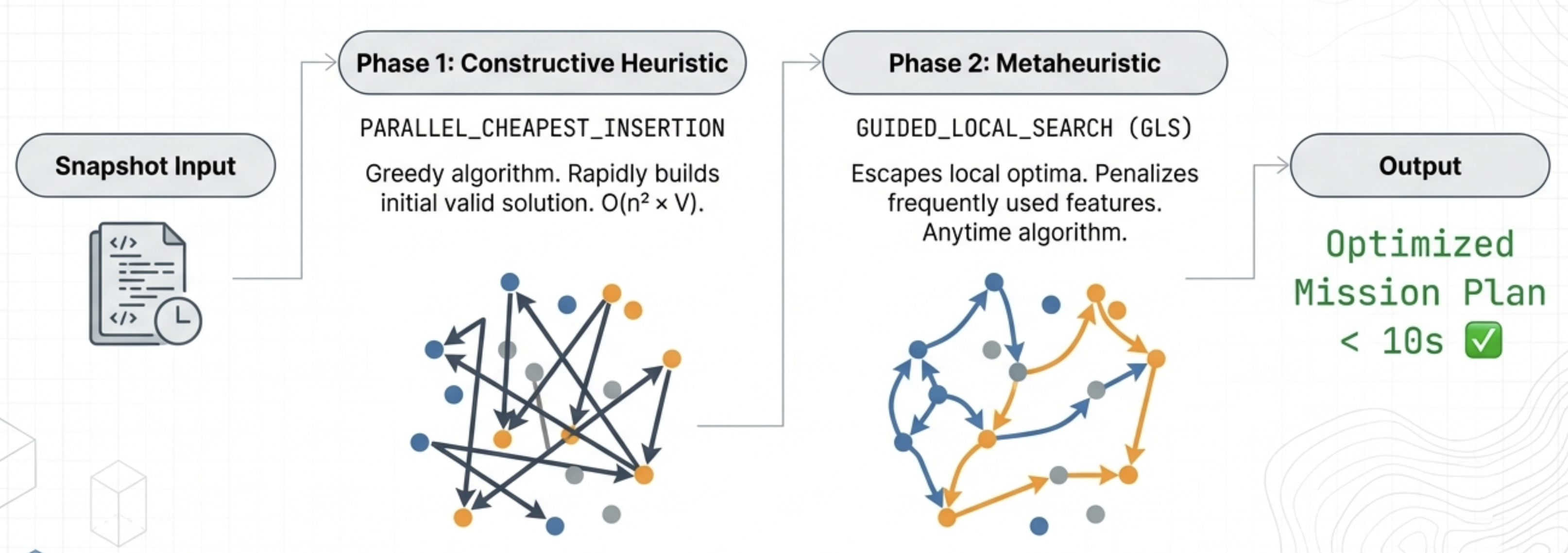
Le VRPPD étant NP-difficile, OR-Tools utilise des heuristiques :
Phase 1 : Heuristique constructive (PARALLEL_CHEAPEST_INSERTION)
Un algorithme glouton qui insère simultanément sur tous les véhicules au meilleur endroit pour minimiser l'augmentation du coût. Rapide (millisecondes).
Phase 2 : Amélioration par métaheuristique (GUIDED_LOCAL_SEARCH)
Améliore itérativement la solution (relocate, swap, move segments) tout en évitant les optima locaux. C'est un algorithme anytime : plus il tourne, meilleure est la solution. Limite : 10 secondes.
Comparaison de complexité
| Approche | Complexité temporelle | Optimalité | Usage pratique |
|---|---|---|---|
| Exacte (Branch-and-Bound) | O(n! / symétries) | Prouvée optimale | Limité à n < 20-30 |
| MILP | Expo (pire cas) | Prouvée optimale | Limité à n < 50-100 |
| Heuristique Voisin Proche | O(n²) | 15-25% de l'optimal | Très rapide, basse qualité |
| PARALLEL_CHEAPEST_INSERTION | O(n² × V) | 10-20% de l'optimal | Rapide, qualité raisonnable |
| Métaheuristique GLS (choix actuel) | O(n²) par itération, borné par le temps | 1-5% de l'optimal | Meilleur compromis vitesse/qualité |
| Algorithmes génétiques | O(P × n² × G) | Variable | Convergence plus lente pour le VRP |
Extraction de la solution
Après résolution, le SolutionExtractor construit les messages MissionAssignment :
1. Parcourt la route de chaque véhicule du dépôt au retour au dépôt.
2. Classifie chaque nœud : DEPOT_START, WAREHOUSE_PICKUP, HOSPITAL_DELIVERY, DEPOT_RETURN.
3. Calcule les métriques agrégées (distance, temps, batterie).
4. Ignore les drones inactifs (trajet dépôt-dépôt uniquement).
Route typique pour commande simple : DEPOT_START → WAREHOUSE_PICKUP → HOSPITAL_DELIVERY → DEPOT_RETURN
Route multi-commandes :